


سرو موتورها امکان کنترل دقیق موقعیت زاویهای، شتاب و سرعت را فراهم میکنند. در این نوع موتور، از یک سیستم کنترل حلقهبسته استفاده میشود. سیستم کنترل حلقهبسته، خروجی فعلی را در نظر گرفته و آن را برای رسیدن به وضعیت مطلوب اصلاح میکند. در این سامانهها، عمل کنترل بر اساس خروجی موتور انجام میشود. یک سیستم بازخورد مثبت، حرکت و موقعیت نهایی شفت را کنترل میکند.
این موتورها برای هر دو نوع جریان مستقیم (DC) و جریان متناوب (AC) ساخته میشوند. از آنجایی که سرو موتورهای AC میتوانند جریانهای لحظهای با شدت بالاتر را تحمل کنند، بیشتر در ماشینآلات صنعتی سنگین استفاده میشوند. سرو موتورهای DC برای کاربردهای کوچکتر مناسبتر بوده و کنترل و بازخورد بسیار دقیقی دارند. سرعت یک سرو موتور به فرکانس ولتاژ اعمالشده و تعداد قطبهای مغناطیسی آن بستگی دارد.
سرو موتور زیمنس انعطافپذیری قابل توجهی در محیطهای تولیدی فراهم میکنند. رباتهای همکاری (Cobots)، نوار نقالهها، دربهای اتوماتیک، تراش CNC، سیستمهای رادار، سیستمهای رهگیری و سامانههای اتوماسیون، همگی از کاربردهای معمول آن هستند. این موتورها نیازمند یک کنترلر نسبتاً پیشرفته نیز هستند. اصل کار سرو موتور مشابه موتور الکترومغناطیسی است، اما در ساختار و عملکرد تفاوتهایی وجود دارد. در سرو موتورهای استاندارد از چرخدنده پلاستیکی و در سرو موتورهای پرقدرت از چرخدنده فلزی استفاده میشود.

ساختار سروو موتور
ساختار سرو موتور
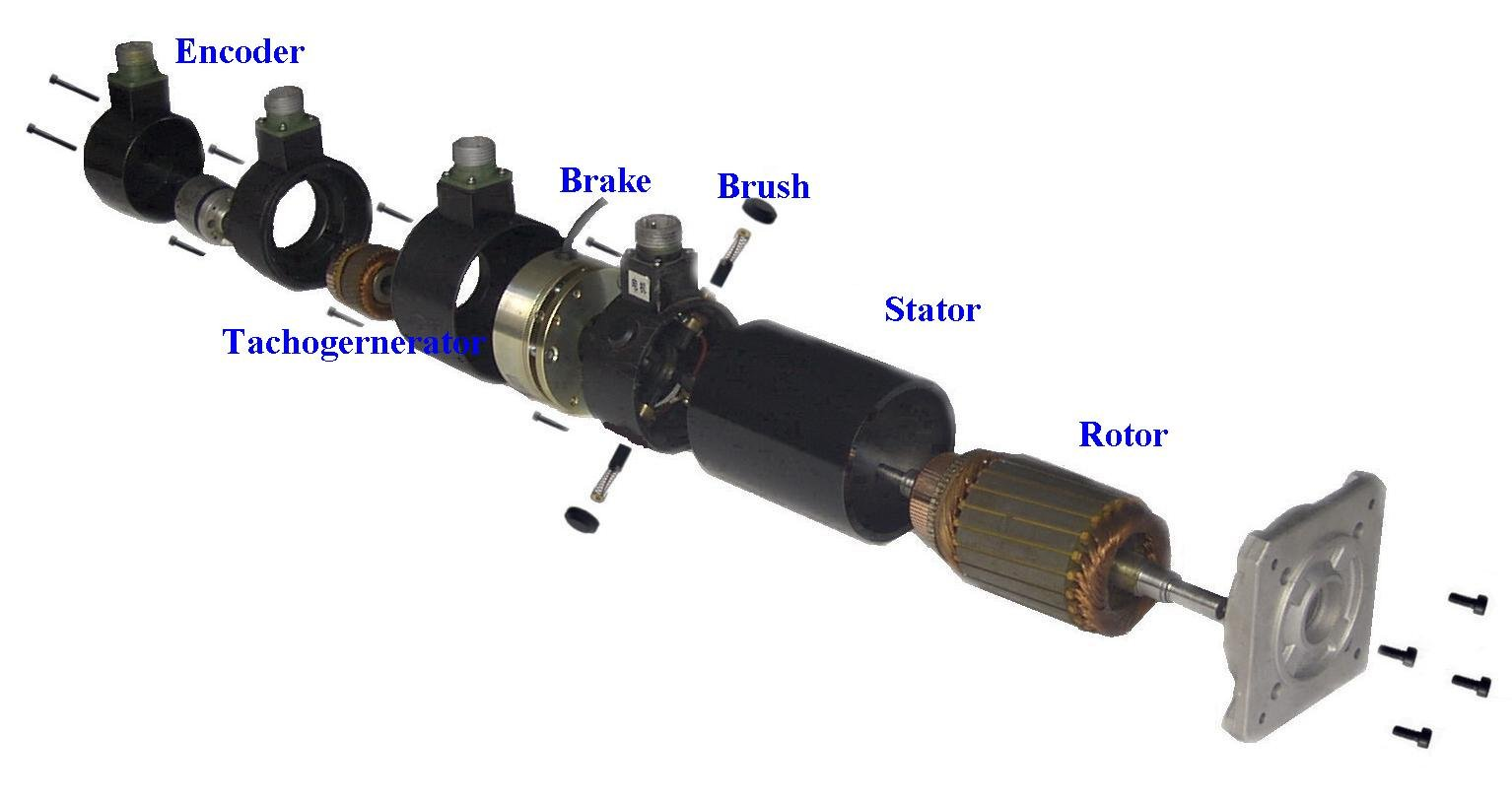
شکل زیر، ساختار یک سرو موتور استاندارد را نشان میدهد.
سرو موتور از دو سیمپیچ تشکیل شده است: استاتور و روتور. سیمپیچ استاتور بر روی بخش ثابت موتور پیچیده میشود و به آن سیمپیچ میدان (Field Winding) نیز گفته میشود. سیمپیچ روتور بر روی بخش متحرک موتور قرار دارد و این بخش با عنوان سیمپیچ آرمیچر نیز شناخته میشود. موتور در قسمتهای جلو و عقب دارای دو بلبرینگ است تا امکان حرکت آزاد شفت را فراهم کند. انکودر شامل یک حسگر تقریبی برای تعیین سرعت چرخش موتور و تعداد دور بر دقیقه است.
سرو موتورها بهطور گسترده در پروژههای کنترل دقیق در اتوماسیون صنعتی به کار میروند. پیشتر، شنیدن نام سرو موتور، اغلب استفاده آن را تنها در پروژههای خاص با نیاز به کنترل دقیق گشتاور، سرعت و موقعیت تداعی میکرد. با این حال، هزینه آنها در سالهای اخیر کاهش یافته و این موتورها به گزینهای عالی برای جایگزینی درایوهای دارای موتور القایی یا عملگرهای هیدرولیک و پنوماتیک تبدیل شدهاند.
هرچند سامانههای هیدرولیک و پنوماتیک هنوز ارزانتر از سرو موتورها هستند، ولی امروزه موارد زیادی را مشاهده میکنیم که سرو موتورها جایگزین آنها شدهاند، بهویژه در کاربردهای هیدرولیکی که به دقت بالا نیاز دارند. مزیت مهم سرو موتورها در این کاربردها، نداشتن مشکلاتی مانند نشتی روغن یا آلودگی خاک و همچنین سادگی و دقت بیشتر در عملکرد نسبت به عملگرهای هیدرولیکی است.
یکی دیگر از ویژگیهای متمایز سرو موتورها، قطر کم و طول زیاد روتور آنهاست که برخلاف موتورهای معمولی است.
سیگنال خطا با مقایسه سیگنال بازخورد (Feedback) با موقعیت فرمان ورودی (موقعیت مطلوب موتور برای یک بار مشخص) ایجاد میشود. اگر اختلافی بین این دو وجود داشته باشد، سیگنال خطای تولیدشده توسط آشکارساز خطا بهتنهایی برای شروع بهکار موتور کافی نیست؛ بنابراین این سیگنال به یک تقویتکننده سرو (Servo Amplifier) داده میشود تا سطح ولتاژ و توان آن افزایش یابد و سپس شفت موتور را به موقعیت مطلوب بچرخاند.
انواع سرو موتور زیمنس
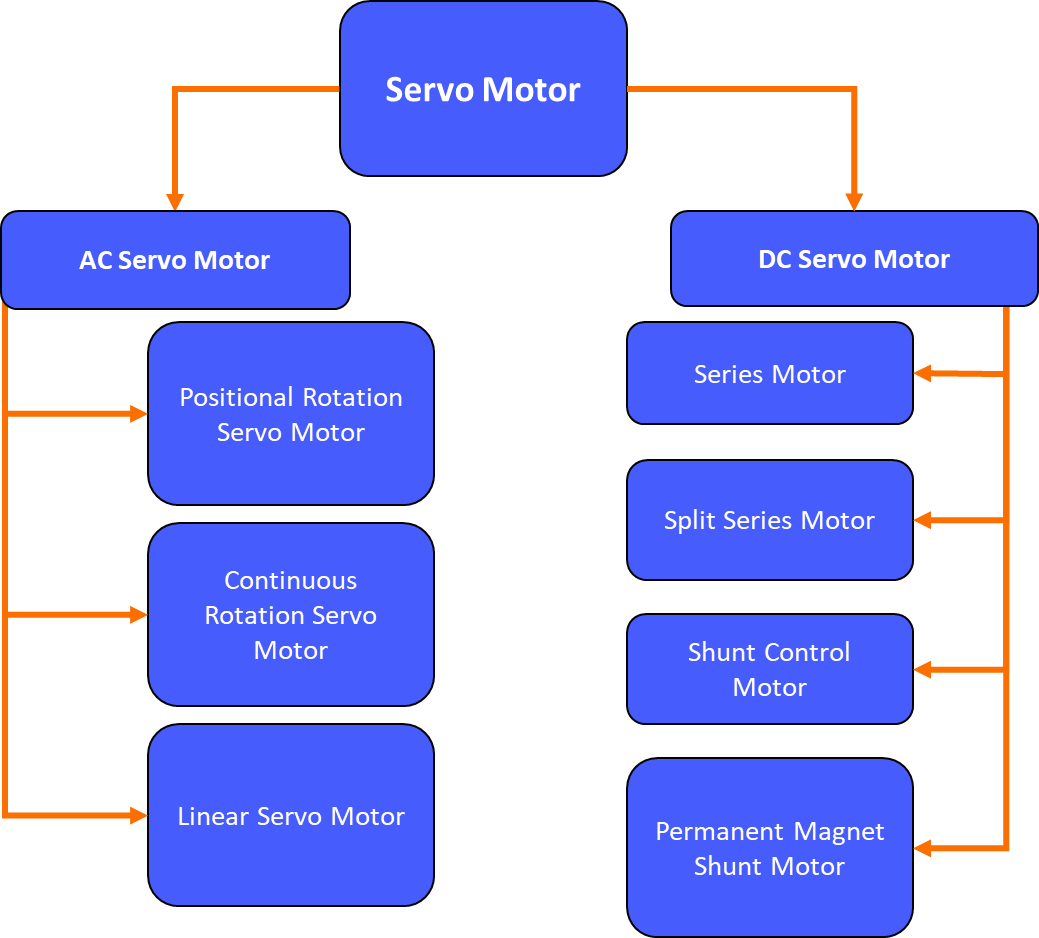
سرو موتورها بر اساس نوع منبع تغذیه مورد نیاز، به دو دسته AC (جریان متناوب) و DC (جریان مستقیم) تقسیم میشوند.
سرو موتورهای DC معمولاً از نوع براشدار با آهنربای دائم بوده و به دلیل قیمت پایین، بازده بالا و سادگی، در پروژههای کوچکتر بیشتر استفاده میشوند. سرو موتورهای AC به علت پشتیبانی از کاربردهای توان بالا، همراه با دقت کنترل بسیار خوب و نیاز به نگهداری کم، بهطور فزایندهای در صنعت محبوبیت پیدا کردهاند.
انواع سروو موتور زیمنس
سرو موتورهای AC به دو نوع همزمان (Synchronous) و القایی (Induction) تقسیم میشوند. همچنین نوع سومی نیز وجود دارد که بیشتر در کاربردهای کوچکتر استفاده میشود (استپر موتور یا Stepper Motor). جدول زیر، توان پشتیبانیشده توسط هر نوع و همچنین مهمترین مزایا و معایب هر نوع سرو درایو را نشان میدهد:
| مشخصات | موتور پلهای (Step Motor) | سرو موتور DC | سرو موتور AC همزمان | سرو موتور AC القایی |
| توان نامی (وات) | کمتر از 100 وات | کمتر از 500 وات | از 100 تا 3.5 کیلووات | بیش از 3.5 کیلووات |
| مزایا | جمعوجور، کمهزینه | ابعاد کوچک، گشتاور بالا، راندمان و دقت کنترل خوب، قیمت مناسب | سرعت بالا، گشتاور بالا، راندمان عملکرد خوب، هزینه نگهداری پایین | سرعت بالا، پیکهای گشتاور بالا، راندمان عملکرد رضایتبخش، هزینه نگهداری پایین، دوام بالا |
| معایب | نویز مغناطیسی، سرعت پایین | محدودیت ولتاژ، اطمینانپذیری پایین، هزینه نگهداری بالا | گرانقیمت | راندمان پایین در توان کم، کنترل پیچیده، گرانقیمت |
سرو موتور DC (Direct Current Servo Motor)
یک سرو موتور DC از یک موتور جریان مستقیم کوچک، یک پتانسیومتر بازخورد، یک جعبهدنده و یک مدار الکترونیکی شامل حلقهی کنترل و راهانداز تشکیل شده است. سرو موتور DC از نظر ساختار شبیه یک موتور DC معمولی است، به این صورت که استاتور آن یک ساختار استوانهای است که آهنربا به بخش داخلی قاب آن متصل شده است.
سرو موتور DC
روتور یک سرو موتور جریان مستقیم (DC Servo Motor) از براش (Brush) و یک شفت (Shaft) تشکیل شده است. محفظه بیرونی موتور به یک کموتاتور (Commutator) و یک قاب فلزی نگهدارنده که روتور در آن جای میگیرد متصل است، و سیمپیچ آرماتور بر روی این قاب فلزی روتور پیچیده شده است.
براش به همراه یک سیمپیچ آرماتور ساخته شده است که جریان الکتریکی را به کموتاتور منتقل میکند. در قسمت پشتی شفت، یک انکودر (Encoder) داخل روتور تعبیه شده است که وظیفه آن تشخیص سرعت چرخشی است. از آنجا که گشتاور متناسب با میزان جریان عبوری از آرماتور است، ساخت یک کنترلر با استفاده از مدارهای ساده، با این نوع ساختار موتور، آسانتر خواهد بود.
یکی دیگر از ویژگیهای این سرو موتور این است که جهت گشتاور تولیدی توسط پلاریته لحظهای ولتاژ کنترل تعیین میشود. سرو موتورهای DC به دستههای زیر تقسیم میشوند:
- موتور سری (Series Motor)
- موتور شانت کنترلی (Control Shunt Motor)
- موتور شانت سری (Series Shunt Motor)
- موتور شانت با آهنربای دائم (Permanent Magnet Shunt Motor)
در نوع سرو موتور RC، یک ولتاژ مرجع DC تعیین میشود که مقدار آن متناظر با خروجی مطلوب است. با توجه به نوع مدار کنترلی، این ولتاژ میتواند از طریق یک پتانسیومتر، یک مولد پهنای پالس (PWM Generator) یا تایمرها به مبدل ولتاژ داده شود. تنظیم پتانسیومتر باعث تولید یک ولتاژ متناظر میشود که سپس به ورودی تقویتکننده خطا (Error Amplifier) اعمال میگردد. در کنترل دیجیتال، یک میکروپروسسور یا میکروکنترلر پالسهای PWM را تولید میکند تا سیگنالهای کنترلی دقیقتر به دست بیایند.
یک سنسور موقعیت (Position Sensor) برای دریافت سیگنال بازخورد متناظر با موقعیت فعلی بار استفاده میشود. این سنسور معمولاً یک پتانسیومتر است که ولتاژی متناسب با زاویه مطلق شفت موتور از طریق مکانیزم دندهای تولید میکند. مقدار ولتاژ بازخورد سپس به ورودی تقویتکننده خطا (که در اینجا نقش یک مقایسهگر را دارد) فرستاده میشود.
تقویتکننده خطا یک تقویتکننده با بازخورد منفی است که اختلاف ولتاژ بین دو ورودی خود را کاهش میدهد. این مدار، ولتاژ مرتبط با موقعیت فعلی موتور (اندازهگیریشده توسط پتانسیومتر) را با ولتاژ مطلوب مرتبط با موقعیت هدف موتور (اندازهگیریشده با پهنای پالس در ورودی مبدل ولتاژ) مقایسه میکند و ولتاژ خطا را به صورت مثبت یا منفی خروجی میدهد.
این ولتاژ خطا به آرماتور موتور داده میشود. هرچه مقدار خطا بزرگتر باشد، توان بیشتری به آرماتور اعمال میشود. تقویتکننده تا زمانی که خطا صفر شود ولتاژ خطا را تقویت میکند و به تبع آن انرژی ورودی آرماتور را افزایش میدهد. موتور تا زمانی که خطا به صفر برسد، به چرخش خود ادامه میدهد. در مقابل، اگر ولتاژ خطا منفی باشد، پلاریته ولتاژ آرماتور وارونه شده و آرماتور در جهت مخالف میچرخد.
به دلیل راکتانس القایی اندک آرماتور، این نوع موتور به فرمانهای شروع یا توقف به سرعت و دقت بالا پاسخ میدهد. این موتورها در طیف وسیعی از تجهیزات و ماشینآلات کنترل عددی به کار میروند.
ساختار آنها به چهار دسته کلی تقسیم میشود:
۱. سرو موتور سری (Series Servo Motor)
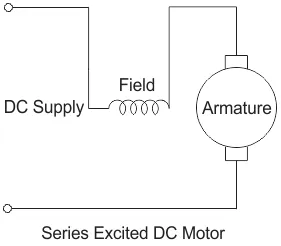
سرو موتور سری
این موتورها گشتاور راهاندازی بالا داشته و جریان زیادی مصرف میکنند. این نوع موتور تنظیم سرعت بسیار کمی دارد. تغییر جهت حرکت را میتوان با معکوس کردن پلاریته ولتاژ میدان و استفاده از یک سیمپیچ میدان سری دوبل (Split Series Field Winding) انجام داد.
سرو موتور سری شکافته (Split Series Servo Motor)
یک موتور سری شکافته میتواند بهعنوان یک موتور کنترلشده توسط میدان که بهصورت جداگانه تغذیه میشود عمل کند. آرماتور موتور، جریان ثابت را فراهم میکند. این موتور دارای منحنی گشتاور–سرعت استاندارد است. این منحنی مشخص میکند که موتور دارای گشتاور سکون (Stall Torque) بالا و کاهش سریع گشتاور با افزایش سرعت است.
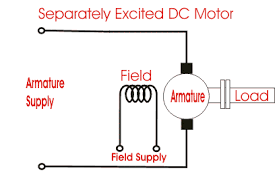
سرو موتور سری شکافته (Split Series Servo Motor)
موتور شانت کنترلی (Shunt Control Motor)
موتور شانت کنترلی دارای سیمپیچهای میدان و سیمپیچهای آرماتور است. سیمپیچهای میدان روی استاتور دستگاه قرار دارند، در حالی که سیمپیچهای آرماتور روی روتور قرار گرفتهاند. در یک موتور شانت DC، این دو سیمپیچ بهصورت موازی به منبع جریان مستقیم (DC Source) متصل هستند.
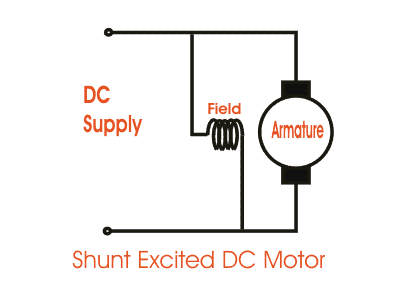
موتور شانت کنترلی (Shunt Control Motor)
موتور شانت با آهنربای دائم (Permanent Magnet Shunt Motor)
این یک موتور با تحریک دائم است که در آن یک آهنربای پایدار میدان مغناطیسی را فراهم میکند. عملکرد این موتور مشابه عملکرد یک موتور میدان دائم کنترلشده توسط آرماتور (Armature-Controlled Permanent Field Motor) است.
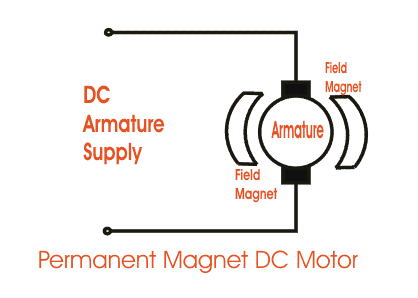
موتور شانت با آهنربای دائم (Permanent Magnet Shunt Motor)
سرو موتور AC (Alternating Current Servo Motor)
موتور القایی قفس سنجابی، موتوری است که روی روتور آن حلقههای سیم کوتاهشده قرار دارد و این روتور بهصورت چرخان درون استاتور حرکت میکند. ولتاژ در روتور از طریق القای الکترومغناطیسی ایجاد میشود. تفاوت اصلی این نوع سرو موتور با یک موتور القایی معمولی در این است که در سرو موتور، میلههای هادی روتور نازکتر ساخته شدهاند که این موضوع باعث کاهش مقاومت الکتریکی و بهبود عملکرد موتور میشود.
این موتورها توانایی تولید گشتاور و توان بالایی دارند و از نظر کارایی و کاربرد، بسیار همهکاره هستند. با این حال، به دلیل راندمان پایین در توانهای کم، معمولاً در پروژهها و ماشینآلات بزرگ استفاده میشوند. پرکاربردترین نوع سرو موتورهای AC، سرو موتور همزمان (Synchronous) است که از یک استاتور و یک روتور تشکیل شده است. استاتور شامل یک بدنه استوانهای با هسته فلزی است که سیمپیچها به دور آن پیچیده شدهاند. یک سر سیمپیچها به ترمینال ورودی وصل است تا جریان الکتریکی را به موتور برساند.
در این نوع سرو موتور، روتور از آهنربای دائم ساخته شده است و به همین دلیل، القای جریان متناوب در آن تأثیری بر میدان مغناطیسیاش ندارد. به علت همین ساختار، سرو موتور AC همزمان را معمولاً موتور بدون جاروبک (Brushless Motor) نیز مینامند.
شکل زیر شماتیک یک سیستم سرو موتور القایی دو فاز AC را نشان میدهد:

سیستم سرو موتور القایی دو فاز AC
ورودی مرجع یا موقعیت مطلوب توسط زاویه θ (تتا) شفت روتور یک ژنراتور همزمان تعیین میشود. در این حالت، ژنراتور همزمان ولتاژ و فرکانس ثابت از منبع تغذیه دریافت میکند. سه ترمینال خروجی استاتور ژنراتور همزمان به ترمینالهای ترانسفورماتور مدار کنترل وصل میشوند تا موقعیت مطلوب شفت ژنراتور به مدار کنترل منتقل شود.
در ابتدا، بین محور ژنراتور و محور ترانسفورماتور کنترلی یک اختلاف زاویهای وجود دارد که به آن خطای موقعیت گفته میشود. این خطا بهصورت ولتاژی در دو سر ترانسفورماتور نمایان شده و سپس قبل از ورود به مدار کنترل فاز سرو موتور، تقویت میگردد. ولتاژ کنترلی که به این مدار داده میشود، باعث میشود موتور در جهتی بچرخد که این خطا به صفر برسد. با این روش، مکان دقیق شفت سرو موتور AC تضمین میشود.
در سرو موتورهای امروزی، معمولاً از PLC زیمنس و میکروپروسسورها برای تولید ولتاژ و فرکانس متغیر استفاده میشود تا کنترل موتور با انعطافپذیری بیشتری انجام گیرد. این سیستمها برای کنترل حرکت، از روشهایی مانند PWM (مدولاسیون پهنای پالس) و الگوریتمهای PID (تناسبی، انتگرالی و مشتقی) استفاده میکنند. شکل زیر یک دیاگرام بلوکی از چنین سیستمی را نشان میدهد که شامل PLC، کنترلر موقعیت و کنترلر سرو است.
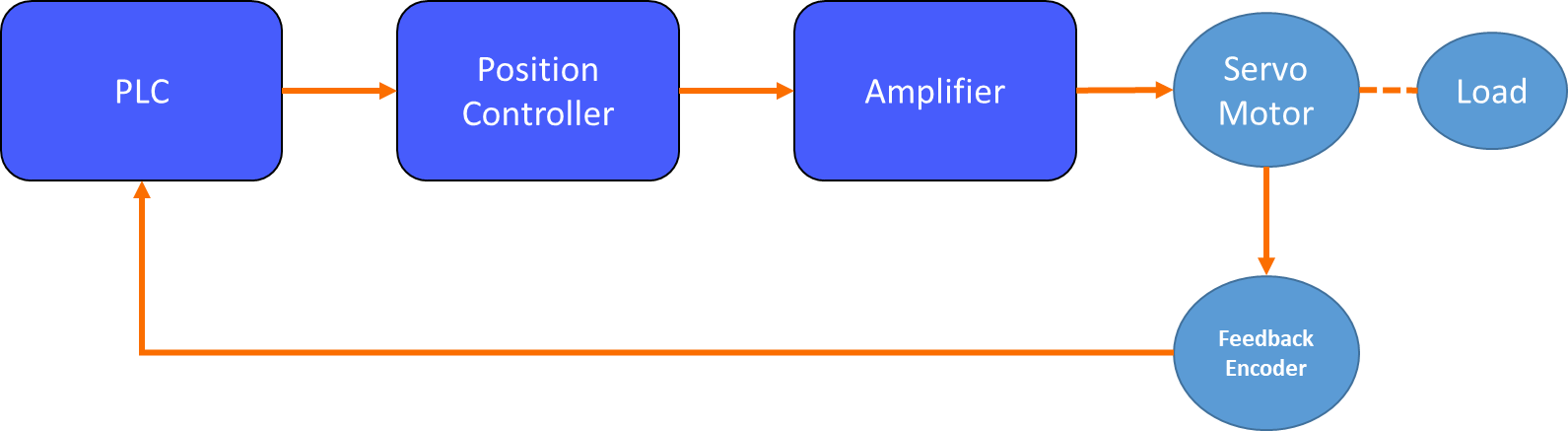
نمودار بلوکی سروو موتور معمولی
سرو موتورهای جریان متناوب در اندازههای گوناگون موجودند و بر اساس نوع حرکتشان دستهبندی میشوند.
سرو موتورهای چرخش موقعیتی دارای تغییر زاویه ۱۸۰ درجه نسبت به نقطه صفر محور خود هستند و مکانیزمهای سازهای (مانند چرخدندههای توقف) دارند که امکان توقف دقیق در حین حرکت را فراهم میکنند.
همانطور که از نامش پیداست، سرو موتور چرخش پیوسته هیچ محدودیتی در دامنه فضایی چرخش ندارد. در این حالت، ورودی سرو موتور مستقیماً به سرعت و جهت خروجی مرتبط است، بهطوریکه موتور میتواند بدون محدودیت حرکت و در هر دو جهت ساعتگرد و پادساعتگرد دوران کند.
علاوه بر این، مکانیزم دنده شانهای و چرخدنده امکان کنترل چرخش شفت را برای سرو موتور خطی فراهم میکند و تغییرات زاویهای چرخشی را به حرکت خطی تبدیل مینماید.
کنترل سرو موتور با PWM
با استفاده از یک سیگنال نوسانی مربعی، تکنیک کنترلی به نام مدولاسیون پهنای پالس (PWM) تلاش میکند یک سیگنال متغیر تولید کند. کیفیت یا دقت سیگنال، بر اساس عرض هر پالس یا مدت زمانی که هر پالس در سطح منطقی پایین (Low) و بالا (High) قرار میگیرد، تعیین میشود. جهت و سرعت چرخش سرو موتور نیز توسط همین سیگنال مشخص میگردد.
بر اساس تعداد پالسهایی که در هر سیکل ارسال میشود، سرو موتورها به دو گروه آنالوگ و دیجیتال تقسیم میشوند.
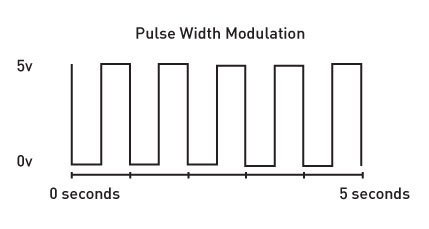
کنترل PWM
سرو موتورهای آنالوگ، هنگام ارسال فرمانها به سرو موتور، از سیگنال توان PWM استفاده میکنند. این موضوع باعث میشود زمان واکنش هنگام تولید گشتاور از حالت سکون به دلیل اینرسی، کمی تأخیر داشته باشد.
در مقابل، سرو موتورهای دیجیتال دارای فناوری داخلی هستند که میتوانند با فرکانس بالاتر فرمانها را بهازای هر پالس ارسال کنند — تقریباً شش برابر تعداد پالسهای یک سیگنال آنالوگ. این فرکانس بالاتر باعث کاهش قابل توجه زمان واکنش موتور و در نتیجه حرکت سریعتر و نرمتر آن میشود.
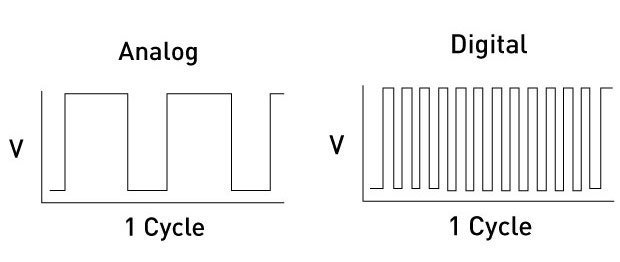
کنترل PWM آنالوگ در مقابل دیجیتال
کاربردهای سرو موتور
سرو موتور کوچک، کارآمد و دارای نقش مهم در کاربردهایی مانند کنترل دقیق موقعیت است. این موتورها توسط سیگنال PWM هدایت میشوند و معمولاً در کامپیوترها، رباتیک، اسباببازیها، پخشکنندههای CD/DVD و سایر تجهیزات الکترونیکی استفاده میشوند. به دلیل نیاز به اجرای دقیق و مکرر یک وظیفه مشخص، این موتورها در بسیاری از صنایع و فرآیندهای تولیدی تقاضای زیادی دارند.
برخی از مهمترین کاربردهای سرو زیمنس عبارتند از:
- در رباتیک برای آغاز حرکات و تعیین زاویه دقیق بازوی ربات.
- در خودروهای رباتیک برای کنترل چرخها، ایجاد گشتاور کافی جهت حرکت، آغاز، توقف و تنظیم سرعت.
- در نوار نقالههای صنعتی که محصولات را از مراحل مختلف عبور میدهند، با کنترل دقیق شروع و توقف جهت کارهایی مانند برچسبگذاری، بطریکردن و بستهبندی.
- در دوربینها برای تنظیم لنز و بهبود وضوح تصاویر فوکوسنشده.
- در دربهای اتوماتیک مکانهای عمومی (سوپرمارکتها، بیمارستانها، تئاترها).
- در صنعت نساجی برای راهاندازی ماشینهای بافندگی، ریسندگی، دستگاههای بافت و دوخت.
- در سیستمهای ردیابی خورشید برای تغییر زاویه پنلها تا همیشه رو به خورشید بمانند.
- در دستگاههای برش و شکلدهی فلز، برای ارائه کنترل دقیق حرکت.
مزایای سرو موتور
- مبدل بسیار کارآمد الکترومکانیکی انرژی.
- فشرده؛ قابلیت تحویل توان نسبتاً بالا در وزن و ابعاد کوچک.
- امکان تغییرپذیری بالا در گشتاور و توان.
- دستیابی به سرعت زیاد، شتاب بالا و صدای کم.
- دارای سنسور چرخش (انکودر) داخلی برای دقت بالا و حلقه کنترل بسته.
- نسبت خوب سرعت به گشتاور در ابعاد کوچک.
- قابلیت تبدیل حرکت چرخشی یا خطی به سیگنال دیجیتال.
- طیف وسیع کاربرد.
- دوام بالا و حفظ عملکرد در شرایط اضافه بار و دمای بالا.
معایب سرو موتور
- نیاز به تنظیم دقیق برای پایداری حلقه فیدبک.
- در صورت خرابی قطعه، رفتار غیرقابل پیشبینی؛ نیاز به مدارهای ایمنی.
- کنترلر پیچیده با لزوم استفاده از انکودر و تجهیزات الکترونیکی پشتیبان.
- گشتاور پیک محدود (در حد ۱٪ سیکل کاری)، حساسیت به اضافهبار طولانی.
- لزوم استفاده از گیربکس در سرعتهای بالا.
- هزینه بالاتر سیستم و نصب نسبت به موتور پلهای به دلیل نیاز به اجزای فیدبک.
تفاوت موتور القایی با سرو موتور
- موتور القایی → سیستم حلقه باز.
- سرو موتور → سیستم حلقه بسته.
- اینرسی موتور القایی بالا، در حالی که سرو موتور اینرسی بسیار پایین دارد.
به همین دلیل، سرو موتور برای مکانیابی سریع و دقیق بار بهکار میرود.
چگونه یک سرو درایو را در مقابل یک VFD انتخاب کنیم؟
سرو درایو زیمنس و درایو زیمنس در ماشینها برای راهاندازی موتورها و کنترل حرکت استفاده میشوند. آنها به نظر میرسد کار یکسانی انجام میدهند، بنابراین چرا یک سرو درایو را به جای یک VFD انتخاب کنیم؟
VFDها با موتورهای القایی در کاربردهایی استفاده میشوند که به کنترل سرعت نیاز است. توانایی کنترل سرعت با تغییر فرکانس ولتاژی که به موتور داده میشود، سیستمهای VFD را متمایز میکند. تفاوت مهم دیگر این است که آنها از بازخورد روی موتور استفاده نمیکنند، که منجر به کنترل سرعت حلقه باز میشود. این بدان معناست که اگر توقفی رخ دهد یا بار تغییر کند، VFDها جبران نمیکنند، که منجر به کنترل سرعت با دقت کمتر نسبت به سروها میشود. VFDها را میتوان تنظیم کرد تا به یک سرعت خاص برسند و سپس برای مدت زمان طولانی در آن سرعت کار کنند.
مانند بسیاری از تصمیمات مهندسی، هیچ قانون قطعی وجود ندارد و مثالهای متعددی از سرو درایوها و VFDها وجود دارد که قابلیتهایی فراتر از نقشهای سنتی خود دارند. برای مثال، پیشرفتهای تکنولوژیک و نیاز دائمی به ارائه ویژگیهای بیشتر باعث شده است یافتن سرو درایوهایی که بتوانند موتورهای القایی را – هم با بازخورد و هم بدون بازخورد – راهاندازی کنند، دیگر دشوار نباشد. به طور مشابه، بسیاری از VFDها میتوانند موتورهایی را با بازخورد راهاندازی کنند (موتور القایی با بازخورد معمولاً به عنوان موتور برداری حلقه بسته یا CLV شناخته میشود). در نتیجه، برخی از حوزهها قابلیتهای سرو درایوها و VFDها را همپوشانی میکنند.
در بیشتر موارد، انتخاب بر اساس نیازهای کاربردی واضح است، اما زمانی که هر دو بتوانند کار را انجام دهند، ممکن است این موضوع نامشخص شود. ما با موقعیتهای ساده شروع میکنیم و سپس توضیح میدهیم که وقتی هر دو مناسب باشند چه اتفاقی میافتد.
وقتی حرکت هماهنگ بین چند محور مورد نیاز است، سرو درایوها بدون شک بهترین گزینه هستند. یا زمانی که شتاب و کاهش سرعت سریع مورد نیاز است، مانند گانتریهای Pick-and-Place. یا زمانی که موقعیتیابی دقیق زیر میکرومتر برای کاربردهای نیمهرسانا یا کنترل دقیق سرعت برای رشد یک شمش سیلیکون مورد نیاز است.
وقتی که سرعت یک نوار نقاله باید روی یک مقدار خاص تنظیم شود، درایو زیمنس انتخاب واضح هستند. یا پمپهای هیدرولیک و دمندههای هوا میتوانند استفاده شوند. یا در مورد برخی وسایل نقلیه الکتریکی، جایی که کنترل دقیق مورد نیاز نیست.
وقتی هر دو بتوانند کار را انجام دهند، به محدوده میانی میرسیم. برای مثال، در کاربردهای حالت سرعت و حالت موقعیت، دقت ممکن است برای یک سرو کمی شل در نظر گرفته شود اما کاملاً در محدوده تواناییهای یک VFD باشد.
سیستمهای نوار نقاله یک مثال عالی هستند. از یک طرف، یک کاربرد ساده نوار نقاله ممکن است فقط نیاز داشته باشد صبح روشن شود و کل روز در همان سرعت کار کند. یک درایو فرکانس متغیر (VFD) انتخاب عالی خواهد بود. برای یک سیستم نوار نقاله پرتقاضاتر که نیاز به شروع، توقف، حرکت رو به جلو و عقب، تطبیق سرعت با نوار نقاله دیگر و غیره داشته باشد، یک سیستم سرو انتخاب بهتری خواهد بود.
طیف گستردهای از سیستمهای نوار نقاله با نیازهای مختلف وجود دارد که برخی از آنها در محدوده قابلیتهای همپوشان هر دو سرو و VFD قرار میگیرند. زمانی که انتخاب واضحی وجود ندارد، تحلیل به عملکرد، ویژگیها و قیمت خلاصه میشود.
عملکرد و ویژگیها
وقتی سیستمی را انتخاب میکنید، هزینه کمتر یک سیستم VFD را در مقابل ویژگیها و عملکرد برتر یک سیستم سرو در نظر بگیرید. سیستمهایی را با ویژگیهایی که نیاز دارید یا میخواهید در نظر بگیرید. سیستم باید چه حرکتی انجام دهد و چه ویژگیهایی محصول نهایی را بهبود میبخشد یا استفاده از آن را راحتتر میکند؟
هزینه
پس از محدود کردن گزینهها بر اساس عملکرد، هزینهها را در نظر بگیرید. سیستمهای سرو معمولاً گرانتر از سیستمهای VFD هستند زیرا بخش زیادی از هزینه مربوط به موتور سرو است. بر خلاف موتورهای القایی، سرو موتورها از آهنرباهای دائم استفاده میکنند که هزینه مواد و ساخت را افزایش میدهد. علاوه بر این، به دلیل داشتن ویژگیهای بیشتر، سرو درایوها اغلب گرانتر از VFDها هستند. وقتی به این نقطه میرسید، این یک معامله بین هزینه و عملکرد است.
بازدهی
از آنجا که نمیتوان آنها را به پریز دیوار زد، بسیاری از کاربردهای موبایل به باتریها برای تأمین نیرو متکی هستند. وقتی باتریها به عنوان منبع تغذیه استفاده میشوند، بازدهی به اولویت اصلی طراحان سیستم تبدیل میشود. این به این دلیل است که افزایش بازدهی به ماشینها اجازه میدهد تا مدت زمان بیشتری بین شارژها کار کنند و زمان کار سیستم را افزایش میدهد.
به یاد داشته باشید که سروها از موتورهای آهنربای دائم استفاده میکنند، در حالی که VFDها از موتورهای القایی استفاده میکنند. موتورهای آهنربای دائم بسیار کارآمدتر از موتورهای القایی هستند، بنابراین سیستمهای سرو زمانی که بازدهی لازم باشد، برتری واضحی دارند.
اندازه
سرو درایوها بسیار کوچکتر و یکپارچهتر از VFDها هستند. اندازه قطعات برای کاربردهای موبایل کوچکتر به دو دلیل مهم تبدیل میشود. اول، قطعات کوچکتر، طراحی و یکپارچهسازی آنها در طرحها را برای طراحان سیستم آسانتر میکند. دوم، قطعات کوچکتر وزن کمتری دارند که وزن کلی ماشین را کاهش میدهد.
وزن کمتر به معنای جرم کمتر برای حرکت است، که به معنای شتاب بهتر و طول عمر باتری بیشتر است. مانند بازدهی، سرو درایوها از نظر اندازه نسبت به VFDها مزیت مشخص دارند. یک سرو موتور برای میزان توان یکسان کوچکتر از یک موتور القایی خواهد بود. طراحیهای جدید سرو نیز مینیاتوری شده و برای کاربردهای موبایل بهینه شدهاند. به همین دلایل، زمانی که اندازه کوچکتر مورد نیاز است، سروها انتخاب واضح هستند. از آنجا که موتورهای القایی AC میتوانند بسیار بزرگتر از سرو موتورها ساخته شوند، VFDها انتخاب پیشفرض برای سیستمهای توان بالا هستند.
توان
توان برای ماشینهای بزرگ ضروری است. سیستمهای سرو تا چند صد کیلووات محدود میشوند، در حالی که سیستمهای القایی میتوانند به مگاواتها برسند. با افزایش نیازهای توان، سیستمهای سرو نهایتاً به موتورهای القایی و VFDها میبازند، اگرچه این انتقال در سطوح توان بسیار بالاتری نسبت به نیاز اکثر کاربردها اتفاق میافتد.
پرموتور و فشردهتر
مزیت واضح موتورهای همزمان نسبت به موتورهای القایی، چگالی گشتاور بالاتر آنهاست. یک سرو موتور با اندازه فیزیکی قابل مقایسه با یک موتور القایی، معمولاً ۴۰ تا ۶۰ درصد گشتاور بیشتری تولید میکند. این بدان معناست که یک سرو موتور باید کوچکتر و سبکتر از همتایان القایی خود باشد تا به گشتاور، سرعت یا توان مورد نیاز برسد. در نتیجه، یک موتور PM برای کاربردهایی با فضای محدود و/یا وزن ایدهآل است.
برای مثال، سرو موتورها در بسیاری از کاربردهای رباتیک که به موتوری کوچک، سبک، با توان، دقت و سرعت بالا نیاز دارند، برتری دارند. خروجی توان فوقالعادهای که سرو موتورها با توجه به اندازه و وزن خود ارائه میدهند، مزیت قابل توجهی برای سازندگان ماشینهای رباتیک فراهم میکند که نتیجه آن راهحلهای مطمئنتر و با کارایی فضایی بالاتر است. این موضوع برای کاربردهای انرژی تجدیدپذیر مانند انرژی بادی نیز صادق است، جایی که عملکرد و بازدهی موتور حیاتی است.
اینرسی پایین برای پاسخ دینامیکی بالا
از آنجا که سرو موتورها کوچکتر هستند، اینرسی کمتری نسبت به موتورهای القایی قابل مقایسه دارند. به دلیل اینرسی پایین، موتور همزمان میتواند بسیار سریعتر به سرعت نامی خود شتاب بگیرد یا از آن کاهش یابد. همچنین اجازه میدهد تا شتاب و کاهش سرعت با دقت بیشتری از حداکثر سرعت انجام شود. بنابراین موتورهای همزمان برای کاربردهای بسیار دینامیک یا کنترل حرکت ایدهآل هستند.
در مورد کنترل حرکت، سرو موتورها برای کاربردهای بستهبندی ایدهآل هستند. این موتورها با اینرسی پایین حرکت دقیق و هماهنگ را زمانی که با کنترلهای حرکتی EtherCAT ترکیب میشوند، فراهم میکنند. از ردیابی تا مرتبسازی و شکلدهی، این پیکربندی انعطافپذیر تقریباً در هر بخش از خط بستهبندی به خوبی کار میکند.
گشتاور کامل در سرعت صفر
مزیت مهم دیگر موتور PM این است که میتواند به طور نامحدود گشتاور کامل را در سرعت صفر حفظ کند. این در تضاد کامل با اکثر موتورهای القایی است که گشتاور و پایداری محدودی در سرعت پایین دارند. تنظیمات VFD (مانند تقویت ولتاژ) را میتوان برای کارکرد با سرعت پایین انجام داد، اما این باعث افزایش گرمای موتور و محدودیت عملکرد میشود. اگر گشتاور نگهدارنده در سرعت صفر مورد نیاز باشد، یا اگر کاربرد به کارکرد در سرعت پایین نیاز داشته باشد، یک سرو موتور (با بازخورد) لازم است.
حفاظت با درجه IP بالاتر
علاوه بر مزایای کنترل موتور، سرو موتورها اغلب در طراحی محفظه خود نیز مزیتهایی دارند. اکثر سرو موتورهای همزمان نیاز به فن خنککننده ندارند، که این امکان را میدهد تا به درجه IP65 برسند. از سوی دیگر، موتورهای القایی معمولاً در محدوده IP44 یا IP54 قرار دارند. بنابراین، اگر موتور در یک محیط سخت کار کند، یک سرو موتور ممکن است برای جلوگیری از خرابی زودرس مزیت داشته باشد.
Servomotors-family
موتورهای سرو طراحی بدون جاروبک دارند که آنها را برای محیطها و کاربردهای سخت ایدهآل میسازد. این شامل صنایع غذایی و نوشیدنی نیز میشود، جایی که ماشینآلات ممکن است در معرض تغییرات شدید دما و شستوشوهای صنعتی قرار گیرند. یک سرو موتور میتواند در بسیاری از کاربردهای صنعتی که فشار یا دمای بالا دارند، مفید باشد.
بهصرفهتر شدن تدریجی
در نهایت، با توجه به مزایای فراوانی که سرو موتورها نسبت به موتورهای القایی دارند، ممکن است بپرسید چرا کسی باید هنوز موتور القایی را انتخاب کند. به طور سنتی، سرو موتورها به طور قابل توجهی گرانتر از موتورهای القایی بودهاند. در حالی که همچنان سرو موتورها گرانتر هستند، اختلاف قیمت در حال کاهش است.
امروزه موتورهای سنکرون با مشخصات توان مشابه موتورهای القایی تنها با ۱۰ تا ۲۰ درصد قیمت بیشتر نسبت به نمونه القایی در دسترساند. پیشتر، یک سرو موتور ممکن بود دو برابر یک موتور القایی قیمت داشته باشد. این شکاف قیمتی احتمالاً با رایجتر شدن سرو موتورها همچنان کمتر خواهد شد.
نکته پایانی
زیمنس سرو درایوهای خود را تحت برند SINAMICS برای انواع کاربردهای درایو DC با ولتاژ پایین و متوسط عرضه میکند. زیمنس مدلهای با عملکرد استانداردی را ارائه میدهد که از V20 با توان تولید تا 30 کیلووات آغاز شده و تا مدل G150/150 با توان تولید تا 2700 کیلووات ادامه دارد. این خط محصولات با عملکرد استاندارد همچنین شامل دو مدل میانی G120 و G120C با ظرفیتهای به ترتیب 250 کیلووات و 125 کیلووات است.
زیمنس همچنین درایوهای خاص صنعت تولید میکند، مانند G120X و G180، که برای سیستمهای پیچیده نیازمند طیف گستردهای از چارچوبهای ارتباطی و عملیاتی و کاربردهای ایمنی ویژه طراحی شدهاند. از نمونههای کاربرد صنعتی میتوان به انتقال مواد، پردازش، پمپها و کمپرسورها اشاره کرد.
آنها مدلهای S120 و S120CM با بهرهوری انرژی بالا را برای کاربردهای ولتاژ پایین ارائه میدهند. این مدلها از مدولاریتی بسیار مقیاسپذیر و انعطافپذیر برخوردارند که میتواند با مجموعهای متنوع از سایر قطعات ترکیب شود. آنها همچنین مجموعه متنوعی از پروتکلهای ارتباطی را پشتیبانی میکنند.
درایو ماژولار با عملکرد بالای S150 SINAMICS میتواند انرژی را از سیستم بازیابی کرده و بهرهوری انرژی را بهبود بخشد. این سیستم ماژولار به راحتی با سیستمهای کنترل بزرگتر و طیف گستردهای از پروتکلهای ارتباطی سازگار میشود. مدل SINAMICS DCM نیز جمعوجور بوده و در عین حال توان خروجی بالایی را در صورت نیاز ارائه میدهد، که گزینهای اقتصادی و کارآمد با کارایی بالا برای کاربردهای سادهتر محسوب میشود.